利用 YOLOv7-Tiny 改进无人机摄影图像的目标检测方法 | MDPI Algorithms
文章来源
太原工业学院计算机工程系张麟华 (科研主任) 团队
文章亮点
针对无人机摄影图像的目标尺度差异大,背景复杂和小目标多导致检测算法无法兼顾精度和速度的问题,文章改进了解耦检测头、WIOU损失函数和小目标检测层,提出了一种改进的针对小目标的检测方法,实验数据表明本文方法能够更准确地检测小目标。下面分别从改进方向和实验结果及结论方面分别介绍。
改进方向
1. 解耦检测头的改进
针对模型分类任务与回归任务之间的矛盾,导致检测精度低,收敛速度慢等问题,引入了解耦头(Decoupled Head),如图1所示。这种方法弱化了分类与回归任务之间的矛盾,从而提高检测精度和加快网络收敛,提高检测效果。
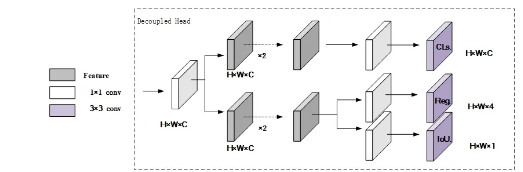
图1. 耦合头和解耦头对比。
2. WIOU损失函数的改进
在小目标预测框的回归中,高质量的预测框一般而言要比低质量的预测框要少得多,将影响网络的训练,本文改进为WIoU损失函数,实现了动态非单调聚焦机制。其损失函数如式 (1) 所示。

式 (1)
3. 小目标检测层结构的改进
随着网络深度的增加,池化层和卷积核的反复操作,特征图中对象的大小不断减小,小目标信息会大幅丢失,从而增加漏检或错检率。本文增加了一个新的P2 (160×160) 小目标检测层,扩张了检测特征层的大小,以提高无人机图像中的检测性能。如图2中P2部分所示。
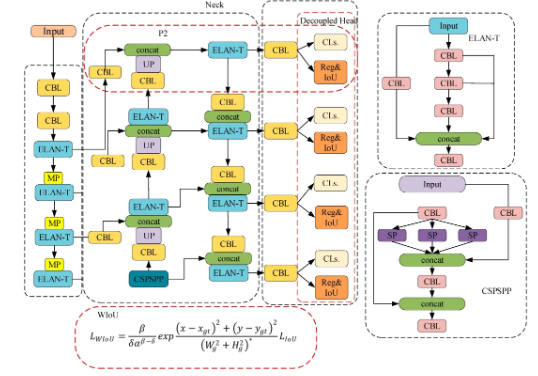
图2. 本文网络结构图。
实验结果及结论
4. 实验结果
在VisDrone-2019和HIT-UAV两个数据集上验证,本文方法在多尺度目标检测性能方面仍优于主流模型,并且对小目标检测效果提升较大。
图3显示了YOLOv7-tiny (图3a) 和本文方法 (图3b) 在VisDrone-2019测试数据集上的检测效果比较。如图3b的蓝框所示,特别是在远景中,可以直接观察到本文方法成功探测到的小物体比图3a所示的多,这相当于降低了小物体被遗漏或错误检测的可能性。此外,还提高了目标的检测置信度和检测精度。例如,与图3a相比,图3b中红色框中两辆白色汽车的检测置信度分别从0.73提高到0.78和0.92提高到0.95。可见,改进的模型提高了检测小物体的能力。
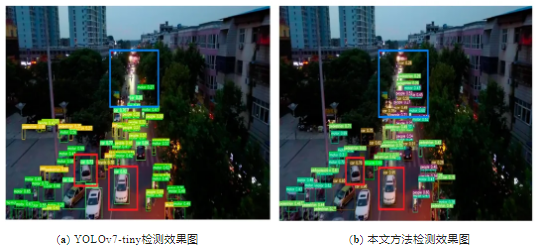
图3. 数据集检测效果对比图。
5. 结论
本文所提方法不仅提高了检测精度,还在计算效率上表现出色,能够在保证高检测率的同时显著降低计算资源的消耗。这一成果为无人机实时监控、灾害评估、农业监测等应用提供了有效的技术支持。该算法具有良好的泛化能力和实际应用价值,可以适应多种复杂环境下的目标检测需求,为未来无人机图像处理的发展方向提供了重要的参考和借鉴。
原文出自 Algorithms 期刊
Zhang, L.; Xiong, N.; Pan, X.; Yue, X.; Wu, P.; Guo, C. Improved Object Detection Method Utilizing YOLOv7-Tiny for Unmanned Aerial Vehicle Photographic Imagery. Algorithms 2023, 16, 520.https://www.mdpi.com/2559922
Algorithms 期刊介绍
主编:Frank Werner, Otto-von-Guericke-University, Germany
期刊关注计算机科学、人工智能、数据和信息系统等跨学科领域研究。目前已被 Scopus、ESCI (Web of Science)、Ei Compendex 等数据库收录。
2023 Impact Factor:1.8
2023 CiteScore:4.1
Time to First Decision:15 Days
Acceptance to Publication:2.9 Days




