微球辅助显微术
光学显微镜是生命和材料科学中最广泛使用的设备之一,使我们能够以优于肉眼的分辨率(人眼在25厘米近点处约为70微米)研究光与物质的相互作用。光学显微镜可提供约0.2微米的空间分辨率,比肉眼高出至少两个数量级,但受光的衍射极限制约。
自17世纪显微镜发明以来,提高其分辨率一直是研究热点。传统显微镜通过物体反射或透射光强度的空间差异获得像素亮度差异,而相位显微镜则利用光波的相位信息。干涉显微镜作为一种相位显微术,在多个学科中得到应用,其轴向分辨率可达纳米量级,但横向分辨率仍受衍射极限制约。
近十年来,微球辅助显微术(MAM)作为一种简单有效的方法,可显著提高显微镜的横向分辨率,甚至突破衍射极限,被称为"超分辨"显微技术。MAM可与定量相位显微术(QPM)集成,实现三维无标记成像。
MAM的主要优点是无需额外的配件,但其视场受到微球尺寸的限制。高数值孔径的显微镜可获得与MAM相近的分辨率,但视场更大。此外,MAM还面临微球引入的像差、畸变以及操控困难等问题。尽管如此,MAM与QPM的结合有望在生物医学和材料表征等领域开辟新的应用。
华盛顿大学医学院副教授Arash Darafsheh团队发表综述文章,以Microsphere-assisted quantitative phase microscopy: a review为题发表在Light: Advanced Manufacturing。本文综述了MAM与相干相描干涉显微术 (CSIM)、数字全息显微术 (DHM)等QPM技术的集成,讨论了相关的开放性问题、挑战和机遇。
小百科1:什么是“相位显微镜”?
在物理学中,相位是描述光波等振荡现象的一个重要概念,表示光波在传播过程中的振动状态。当光穿过样品时,样品的厚度和折射率差异会引起光程的变化,从而改变光波的相位。这种相位变化携带了样品的结构信息。
传统显微镜主要关注光强度的变化,但对于透明样品,它可能无法提供足够的对比度,因为透明物体主要改变光的相位而非振幅。为了解决这一问题,科学家发明了相位显微镜。
相位显微镜通过将样品引入的相位变化转化为强度变化,来产生图像对比度。它将样品引起的相位变化转化为亮度差异,使我们能够观察到透明样品的精细结构。相位显微镜主要分为两大类:相衬显微镜和干涉显微镜。
相衬显微镜利用衍射光与未衍射光之间的干涉来产生相位衬度。当光穿过样品时,样品会将光分为两部分:未衍射光和衍射光。相衬显微镜利用这两束光在像平面产生干涉,从而增强图像对比度。
干涉显微镜则通过测量样品光和参考光之间的相位差来获得定量相位图像。它将照射到样品上的光分为两束:一束光照射样品,另一束光作为参考光。这两束光在相位和振幅上都发生了变化,它们的干涉可以提供样品的定量相位信息。
小百科2:什么是“三维无标记成像”?
当我们谈到显微成像时,通常会想到染色或荧光标记等方法来增强样品的可见度。但这些方法可能会对样品造成损伤或干扰。而三维无标记成像技术则可以在不对样品进行任何标记的情况下,获得样品的三维结构信息。
相位显微术利用光波的相位信息,根据样品厚度和折射率差异引起的光程变化,重构样品三维形貌。然而,其分辨率受到衍射极限的制约。
微球辅助成像技术可突破这一限制。微球能增大系统的有效数值孔径,从而提高分辨率,甚至超越衍射极限。
将微球技术与相位显微术结合,形成了微球辅助相位显微术。这一方法能以无损、无标记方式对细胞、组织和材料表面进行三维成像,实现纳米级轴向和超衍射极限横向分辨率。
在显微镜装置中加入微球有多种可能性,本篇综述文章详细讨论了微球辅助相干扫描干涉显微术 (CSIM)和数字全息显微术 (DHM)。
CSIM和DHM这两种定量相位显微术(QPM),可用于非透明和透明样品的纳米级轴向和高横向分辨率显微成像。这两种技术都是通过捕获物体和参考场之间的干涉图案来操作的,都具有无标记显微镜的优点,消除了潜在有害的染色或标记程序的需要。
微球辅助相干扫描干涉显微术
相干扫描干涉显微术 (CSIM)基于轴上干涉(物体和参考两个臂具有相同的光轴)。在两个臂之间引入受控相移用于测量样本引入的相移。该相移基于样品中光路长度和折射率的变化。至少需要捕获三个图像,并且通常使用低相干源。
作者讨论了微球辅助CSIM的实验和理论研究,并从理论角度来看讨论了数值模拟系统的可能性。一个全面的3D模型来描述整个成像系统,包括照明、微球、物镜、3D样品及其基底以及成像传感器将非常有用,有助于完全了解MAM的分辨率增强机制。除了更好地理解之外,完整模型还有助于通过优化系统参数进一步提高分辨率。然而,此类模型需要极大的计算资源,超出了当前常规计算机的能力。
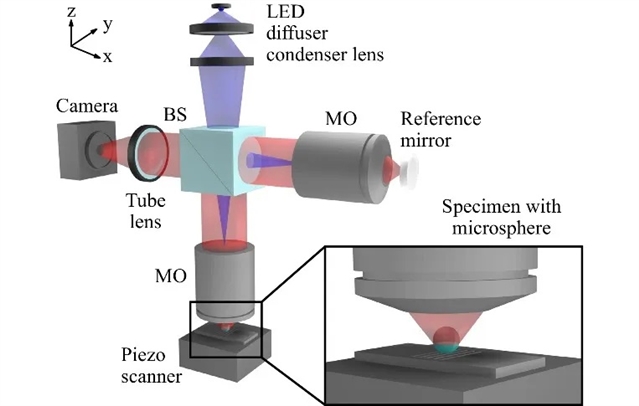
图2:基于Linnik设置的微球辅助CSIM装置
微球辅助数字全息显微术
数字全息显微术 (DHM)基于离轴干涉,通过同时记录干涉图案中的振幅和相位信息作为全息图来记录物体的复杂波前,然后数字全息图被数字重建为3D定量图像, 仅需要一张图像捕获,并且通常需要高相干源。
与DHM的其他分辨率增强技术相比,MAM具有显着的优势。除了极其简单、低成本和易于实施之外,MAM还可以通过单个全息图在所有空间方向上同时实现分辨率增强,这对于快速动态地对活体标本进行实时成像至关重要。MAM还受益于DHM的优势功能。MAM在DHM中的应用可以克服传统显微镜中加入球面透镜带来的问题,如球面像差、弯曲变形和成像视场的牺牲等。在DHM中,只需拍摄在没有物体的情况下记录的参考全息图,就可以抑制任何污染、图像失真和像差。因此,微球的精确定位和保持一致的微球与样品距离(这些在MAM成像过程中具有挑战性的问题)在微球辅助DHM中变得不那么明显。

图3:微球辅助Mirau DHM装置。
当前研究热点与挑战
文中还针对MAM当前的技术方法和存在的挑战进行了分析,主要包括分辨率增强背后的物理原理,微球操纵方法,视场限制以及图像扭曲和像差等问题。
分辨率增强背后的物理原理
MAM分辨率增强的确切机制尚未完全了解,目前是深入研究的主题,有助于分辨率增强的主要因素被认为是系统有效数值孔径和倏逝波收集的增强。为了理解MAM的超分辨率机制,人们进行了广泛的研究,并主要基于理论假设提出了一系列假设。为了确保MAM和其他成像方式的分辨率增强之间的公平比较,需要遵守分辨率的经典定义和与样本无关的方法。
微球操纵方法
在MAM中,微球可以直接放置在样品上,也可以通过杠杆以非接触方式控制。已经提出了几种技术来精确地在样本上移动微球,这些技术包括连接到显微操作器的微针、刚性轴(玻璃棒)的锋利尖端、悬臂尖端、使用光纤、使用微移液器和光纤 -微球。然而,在样品的所需区域上实现微球的精确定位仍然是一个挑战。
视场限制
样品表面不均匀时,由于分辨率和放大倍数可能随微球与样品之间的距离而显着变化,因此需要精确的反馈系统来控制微球与样品表面之间的距离。一项研究表明,FoV约为D/5-D/4,其中D是微球的直径。尽管视场角随着微球尺寸的增加而增加,但放大倍数和分辨率却降低,这表明这些参数之间存在权衡,增加FoV是MAM面临的挑战之一。主要研究方向是通过球体或球体阵列扫描样本来拍摄一系列图像,然后拼接获得的图像以创建宽视场图像。
图像扭曲和像差
MAM会受到微球引入的图像失真和像差的影响。研究表明,当微球与其周围介质的折射率对比度在1.5至1.75108范围内时,微球可以带来可忽略的球差和高NA,设计专用MO和自适应光学器件可能会提供解决方案。
DHM的数字重建能力在一定程度上缓解了这些问题。
DHM在提高分辨率的同时,可利用DHM的数字重建能力减轻由微球引入的像差和畸变。关键步骤是分别重建带样品和不带样品(参考)的全息图,获取它们的复振幅分布。然后将样品全息图的复振幅除以参考全息图的复振幅,实现复振幅除法。
由于光学系统和微球产生的畸变在两个全息图中是相同的,通过复振幅除法,这些畸变可被有效消除。最终获得主要反映样品信息的相位和振幅分布,改善了图像质量。虽然校正并不完美,但确实在很大程度上减轻了微球引入的像差问题。
DHM的这一数字重建和校正优势,使得集成微球后不仅分辨率得到提升,而且可获得高质量三维定量相位图像,从而使微球辅助DHM成为一种实用的超分辨成像技术。
总结与展望
MAM利用介电微球提高显微系统的横向分辨率,且不需要额外的附件。MAM在某些情况下被称为超分辨技术,其分辨率甚至超过了传统高数值孔径显微系统。大量研究致力于理解MAM中的物理机制,但需注意区分不同MAM配置。
本文详细讨论了MAM在相干扫描干涉显微镜和数字全息显微镜中的应用,重点在于微球的使用,而非比较系统优劣。
从理论角度看,建立包括照明、微球、物镜、三维样品及其基底和成像传感器在内的全面三维模型,对完全理解MAM的分辨率增强机制具有重要意义。完整模型还有助于优化参数,进一步提高分辨率,但需要极大的计算量,目前常规计算机难以实现。
从实验角度看,MAM在某些情况下的实施并非易事,如视场较小,大面积观察速度受限。克服这些问题将为MAM的未来发展带来新的可能性。
尽管MAM面临一些挑战,但其在生物医学和材料科学等领域具有广阔的应用前景。
(来源:先进制造微信公众号)
相关论文信息:https://doi.org/10.37188/lam.2024.006


